Buenos días en esta entrada os voy a explicar qué estamos haciendo en la asignatura de TIC como proyecto final del curso.
En primer lugar debéis saber que estamos trabajando en un proyecto en el cual debemos crear una aplicación que disminuya o erradique la violencia en los centros escolares,este proyecto lo estamos haciendo con la fundación Create,y esta era la encargada de elegir qué grupo iría a presentar su proyecto más tarde en una feria que se celebraría en junio.
Yo he participado de diferentes formas,la primera forma fue recortando y exportando los diferentes botones que os iré colocando aquí:
-Botón de continuar:
-Botón de "ayudar a personas que sufren bullying":
-Botón de "llamar a la policía":
-Botón de "semáforo amarillo":
En segundo lugar he participado en la búsqueda de información y la creación del guión con mi compañera Jimena, el guión podréis escucharlo más tarde cuando termine colocando el video en esta entrada del portfolio.
Captura del guión:
Por último os voy a hablar de todo lo que he aprendido.
En la realización del proyecto he aprendido varias cosas, desde realizar una buena búsqueda de información hasta cual es el verdadero significado del bullying, además he aprendido a como programar una aplicación, como recortar y exportar desde el programa de GIMP y por último pero no más importante a como organizarme con mi equipo para que cada uno tenga una labor.Todo esto lo he aprendido con la ayuda de mis compañeras de grupo y las explicaciones que nos dio previamente el profesor en su momento.
Buenos días,en esta entrada os voy a hablar sobre el último proyecto que hemos hecho en la asignatura de matemáticas aplicadas.
El proyecto consistía en conseguir que el robot que montamos en la asignatura de tecnología y robótica pudiese realizar movimientos en línea recta,movimientos hacia atrás y movimientos acelerados, es decir que si empezaba con un 40% de potencia llegase a partir de los 3 segundos a un 80% por ejemplo.Este robot lo montamos con Crumble,que es un entorno de programación gráfico inspirado en Scratch.
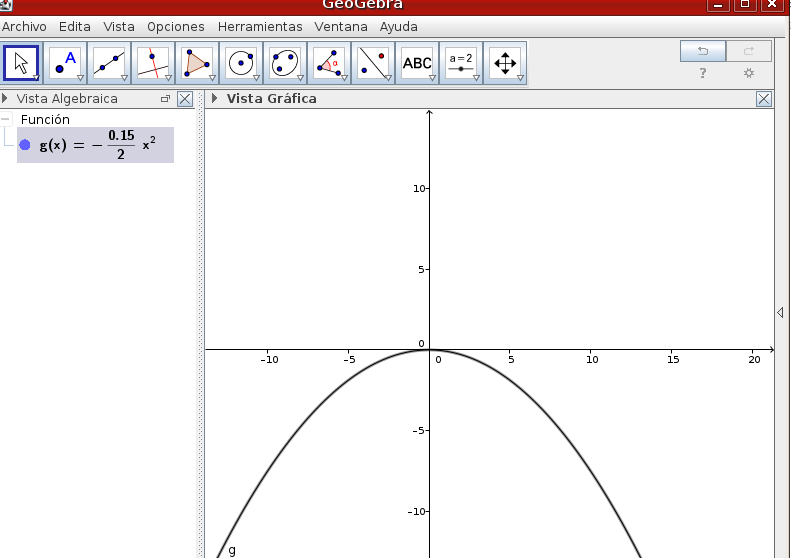
Aparte de esto también usamos Geogebra para representar las gráficas.
En primer lugar el profesor nos envió por Edmodo algunas prácticas que podíamos hacer con el robot,estas prácticas eran de movimiento rectilíneo uniforme y debían resolverse mediante esta fórmula:
Después a partir de los resultados que nosotros sacamos con sus ejercicios debíamos lograr alcanzar diferentes distancias en los tiempos que nos indicaba el ejercicio.Aquí podéis ver imágenes de las primeras gráficas que realizamos con Geogebra.
Ejercicios que debíamos hacer:
Primer ejercicio 1:
Primer ejercicio 2:
Primer ejercicio 3:
Primer ejercicio 4:
Primer ejercicio 5:
Primer ejercicio 6:
Primer ejercicio 7:
Las gráficas nos salían bien pero al aplicarlas en la práctica no salió bien ya que nos dimos cuenta de que el robot debía tener de mínimo un 25% de potencia en las ruedas ya que si no el robot no corría.
Por lo tanto el profesor nos propuso nuevos ejercicios y a partir de esos nuevos ejercicios vimos cuantos m/s debía hacer nuestro robot.Aquí podéis ver una imagen de la hoja de cálculo:
Más tarde comenzamos a trabajar con estos nuevos m/s y nos pusimos a trabajar en las gráficas:
Ejercicio 1:
Ejercicio 2:
Ejercicio 3:
Ejercicio 4:
Ejercicio 5:
Aquí podéis ver el robot con el que trabajamos:
Todas las gráficas las fuimos haciendo a la vez que poníamos en práctica la programación del robot.La programación del robot la hicimos con Crumble como ya he dicho antes, esta consistía en lo siguiente:
Cuando el programa comienza,el robot debe esperar 3 segundos para empezar a moverse, si el analógico A es menor que 20 el motor 1 irá a 41% y el motor 2 irá a 40% más la potencia de las otras ruedas,ya que los tantos por ciento del motor se refiere a la potencia de las ruedas.Y fue a partir de esto de lo que fuimos realizando las diferentes pruebas.
Aquí tenéis algunos de los vídeos:
-8 segundos/1,20 m
-1 segundo/1,15 m
- 2 segundos/30cm
- 3 segundos/45cm
- 4 segundos/60cm
Más adelante el profesor nos explicó como podíamos conseguir que el robot realizase un movimiento acelerado,el movimiento acelerado se conseguía mediante este código:
Este código es el que conseguía que el robot pudiese hacer movimientos acelerados indicándoselo de tal forma que cuando el programa empezase había que dejar al motor uno y al motor dos esperar 3 segundos para moverse y cuando este comenzase a moverse debía ir incrementando la velocidad de ambos motores,pero calculando la distancia,para así al llegar a la distancia que se quería conseguir pararse para más tarde continuar.
A continuación os hablaré de lo que he aprendido con este proyecto,con este proyecto he aprendido a trabajar con Crumble,he aprendido a programar y montar un robot, he aprendido a trabajar con Geogebra y realizar hojas de cálculo y representación de funciones dentro de este programa por último he aprendido a grabar en movimiento con un carro que nos proporcionó el profesor.Esto lo he aprendido mediante las explicaciones que dieron los 2 profesores (el de matemáticas y el de tecnología), aparte de las explicaciones lo he aprendido con la ayuda de algunos compañeros como Alejandro,Antony o Bryan.
También debéis saber que lo que más nos costó como equipo fue encontrar la manera de que el robot no se fuese hacia los lados ya que no conseguíamos que fuese recto y si no iba recto no podíamos comprobar lo que debíamos comprobar.(diferentes velocidades y cuantos metros por segundo hacía en diferentes distancias)
Supongo que sí salió como esperaba ya que lo que buscábamos lo encontramos y aunque no nos salían los metros por segundo exactos descubrimos que nos daba la posibilidad de sacar otra forma de representar la función por lo tanto estoy contento con el resultado, así que de volver a hacerlo no cambiaría nada.
Por último debéis saber que de todo el proceso destacaría el momento en el que conseguimos grabar nuestro primer vídeo ya que después de muchos intentos fallidos ya que el robot se nos iba hacia los lados,conseguimos mediante un método tan simple como bloquear la rueda ,que el robot fuese recto.El resultado no era exacto ya que debíamos ajustarlo y redondearlo para conseguir los resultados más o menos iguales que los que teníamos en la hoja de actividades.
Buenos días, en esta entrada os voy a explicar en que consistió la práctica que realizamos en la asignatura de ciencias aplicadas.
La práctica consistía en crear colonias de bacterias,entonces lo que hicimos fue ponernos en parejas y a partir de aquí ponernos de acuerdo para así cada uno traer una marca diferente de yogurt y ver como reaccionaría la colonia de bacterias en cada uno de estos yogures,esa práctica la intentamos con los siguientes elementos:
-Yogurt: producto lácteo que se obtiene de la fermentación bacteriana de la leche.En nuestro caso utilizamos uno no esterilizado.
-Placa de Petri: es un recipiente con forma redondeada que sirve para cultivar, observar o examinar diferentes aspectos de la biología.La mancha negra de la parte izquierda era el número de grupo,en este caso el número 6.

-Agar nutritivo: es un medio de cultivo que se utiliza para cultivar sobre todo bacterias.
-Guantes: prenda que utilizamos para poder manipularlo todo sin transferir a los elementos limpios ningún tipo de bacteria.
-Batas: prenda de laboratorio.
-Asa de siembra: es un instrumento de laboratorio que se utiliza para introducir de manera segura la muestra que debemos meter en la placa de Petri.
En primer lugar nos pusimos las batas, nos lavamos las manos y nos pusimos los guantes ya que teníamos que tener las manos limpias y sin bacterias para trabajar con los materiales del laboratorio,más tarde nos colocamos con nuestras respectivas parejas,en mi caso Kilmer, y empezamos a escuchar la explicación de Mónica y Julio mientras el Agar nutritivo se descongelaba.
Mónica nos explicó que no podíamos dejar abierto y expuesto el vidrio de las placas de Petri ya que si no podría recibir bacterias que se encontraran en el aire,por lo tanto nos explicaron entre los 2 todo paso por paso.Pasos.
Paso 1: coger el yogurt y de este con la asa de siembra recoger líquido que hay en este y colocarlo en la parte del lateral izquierdo de una de las placas de Petri.
Paso 2: colocar el agar en el lado opuesto de la placa.
Paso 3: cerrar la placa y remover con 2 dedos durante un par de minutos para así conseguir que el agar y el líquido bacteriano se fusionen.
Paso 4: poner celo a las placas y dejarlo en reposo durante una semana.
Por último a la semana comprobarlo y observar el resultado final,del cual podéis ver una imagen aquí.
Aquí podéis ver lo que había en cada una de las placas de Petri
-Prueba en pomo de la puerta del baño:
En la foto no se pueden apreciar debido al color marrón que tiene la placa pero había un montón de colonias bacterianas transparentes,que se formaron a partir de la contaminación del aire.
Prueba en pantalla de teléfono móvil:
No se aprecia demasiado bien pero hay muchas colonias transparentes,estas colonias se formaron debido a la contaminación del aire.
Prueba realizada por mi pareja (Kilmer) y yo:
En nuestra placa de Petri había diversas colonias de color naranja que se formaron debido al lactobacillus del yogurt.